
机器东谈主前瞻(公众号:robot_pro)
作家 | 许丽念念
裁剪 | 漠影
近期,ICRA 2026、CVPR 2026 Workshops等机器东谈主与具身智能商酌会议、竞赛密集举行,围绕实在机器东谈主任务的真机评测,正在成为行业不雅察具身智能落地本事的进攻窗口。
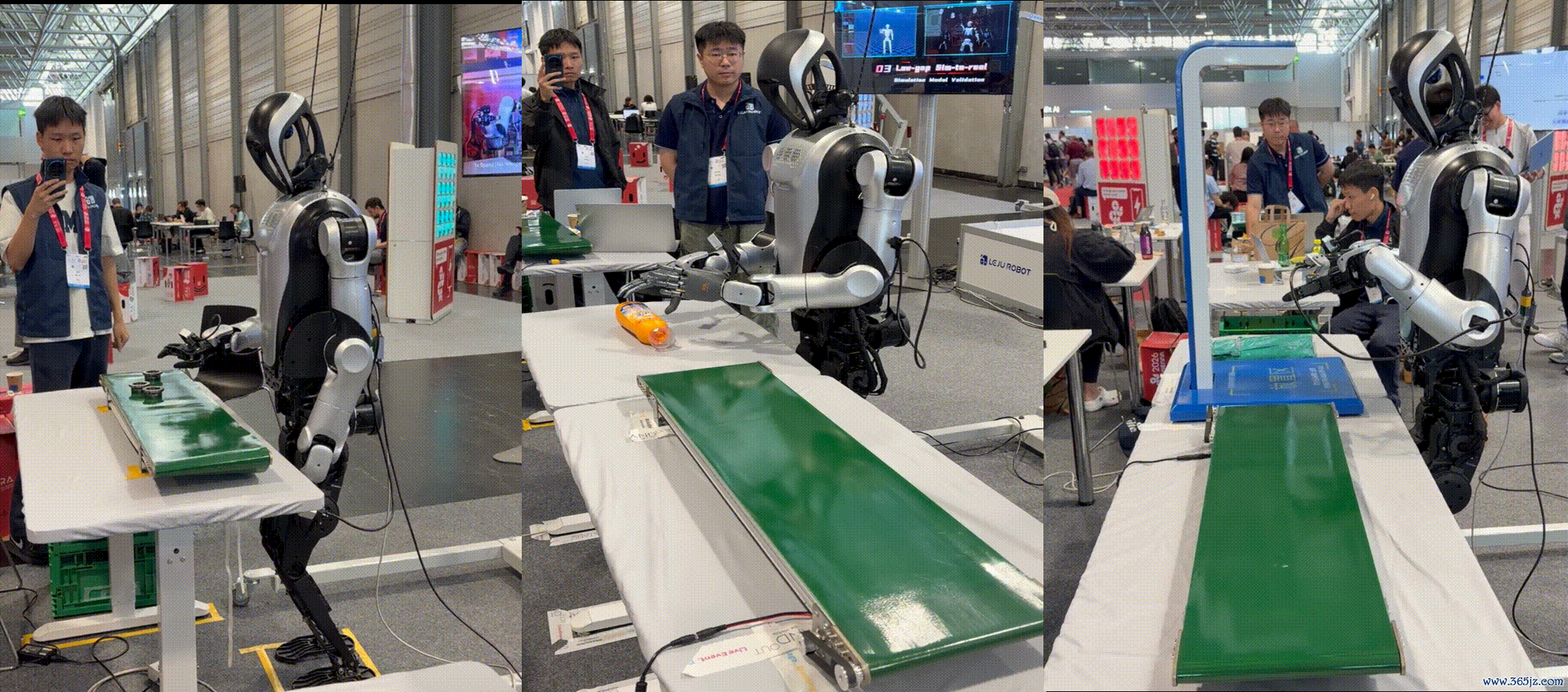
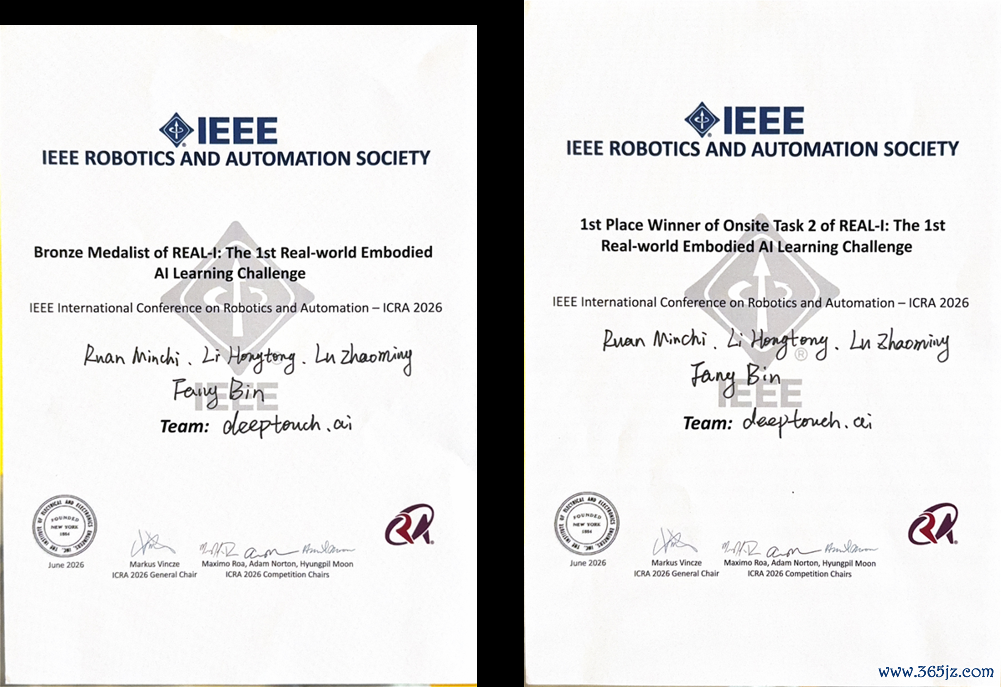
在ICRA举办的REAL-I具身智能挑战赛中,一个比赛放弃近期在机器东谈主圈激发猜度:在48支来自环球的参赛军队中,一支中国团队拿下线下真机操作任务独一满分。

这支名为deeptouch.ai的军队,由北京邮电大学教师、瞬恒智能首席科学家方斌领衔。比赛中,团队在东谈主形机器东谈主工业上料操作单项赛中取得满分,成为通盘参赛军队中独逐个支在线下真机操作任务中取得满分的军队。
尊龙凯时2026世界杯中国官网比较于在往日两年常被猜度的明星公司,方斌所指示的瞬恒智能此前一丝发声,直到赛事收获激发关注。
一、环球48支军队参赛,聚焦实在机器东谈主任务
REAL-I,全称The 1st Real-world Embodied AI Learning Challenge,积累了来自环球各地的48支军队线下参赛,是这次ICRA中线下真机参与军队最多的赛项之一。和平淡仿真评测或单次机器东谈主演示不同,REAL-I的赛制重心放在实在机器东谈主平台、实在工业任务和谐和评测用具上。
参赛团队需要经验仿真、线上真机和线下现场挑战三个阶段。模子不仅要在诬捏环境中跑通,还要被实在部署到机器东谈主上,在现场环境中接受任务磨练。
据了解,线下挑战配置了三个典型工业任务:金属件姿态转机、日化瓶取放与高下料、快递包裹扫码分拣。这些任务并不追求视觉上的炫技,但王人接近工业现场中常见的机器东谈主操作需求。
在这些任务中,机器东谈主需要及时识别物体位置,判断握取时势,策划机械臂阐发轨迹,并通过结尾履行器完成实在物体操作。名义上看是握取、迁移和抛弃,背后则是感知、策划、放弃和履行的圆善闭环。
比较一次梦想环境中的Demo,这类赛制更强调模子能否被部署到实在机器东谈主上,并在现场条目下完成相连任务。
往日一年,具身智能行业并不短少机器东谈主演示视频。但实在产业场景中,客户关切的往往不是机器东谈主能否在梦想环境下完成一次动作,而是能否在物体位置变化、现场条目概略情、补凑数据有限的情况下,持续褂讪地完成任务。
二、相连三轮,满分考证实在操作褂讪性
在东谈主形机器东谈主工业高下料操作任务中,方斌团队取得了全场独一的满分,也因此激发多数关注。
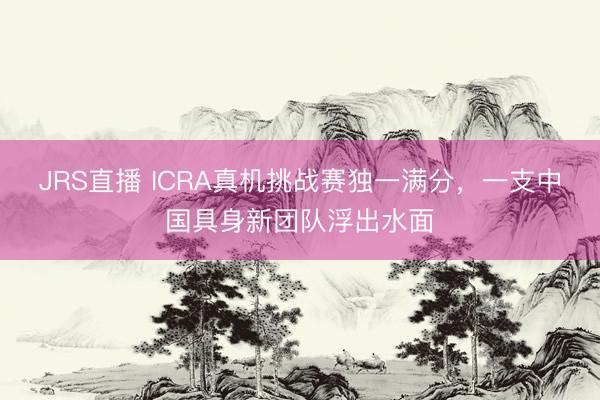
在这一任务中,机器东谈主需要从一个传送带上握取物体,通过双臂协同完成布置,再将物体褂讪抛弃到另一个传送带上。
对东谈主来说,这是一组很当然的动作:看见物体,伸手提起,递给另一只手,再放到指定位置。但对机器东谈主而言,这个历程触及多个相连步调。
现场任务中,物体位置会被赶紧再行摆放,传送带持续阐发。机器东谈主需要判断适应的握取点,策划双臂阐发轨迹,完成双手之间的布置,并在动态场景中准确抛弃。
任一步调出现偏差,王人可能导致任务失败。握取角度不准,物体可能拿不稳;双臂布置时序不合,物体可能掉落;抛弃位置偏差过大,JRS直播2026世界杯赛事直播入口也无法完成任务要求。
最难的是,REAL-I并不单看一次操作的完成度。按照比赛划定,机器东谈主需要在物体赶紧再行摆放后相连完成三轮任务,并以平均收获动作最终得分。因此,满分不仅代表一次得手操作,更代表模子在多轮扰动下仍能保持褂讪输出。
关于正在走向产业落地的具身智能而言,这类本事的进攻性正在上涨。机器东谈主演示不错采选最梦想的一次放弃,但实在工场无法接受“偶尔得手”。在实在场景任务中,褂讪性、可复现性和现场快速适配本事,往往比单次任务上限更重要。
三、专攻聪惠操作智能,让机器东谈主结束价值创造
deeptouch.ai背后,是配置于2025年的瞬恒智能。
这是一家此前对外信息并未几的具身智能创业公司。经机器东谈主前瞻了解,瞬恒智能聚焦机器东谈主聪惠操作与触觉智能,试图从视触觉和会、触觉感知和结尾操作模子等方针,不停机器东谈主参加实在产业场景时濒临的操作问题。
和一些从整机形态、阐发本事或通用东谈主形机器东谈主故事切入的公司不同,瞬恒智能的时刻路子聚焦于不停机器东谈主价值创造的“临了1mm”。
这亦然动作首席科学家的方斌永久的研究方针。公开贵寓夸耀,方斌曾任教于清华大学蓄意机系,现为北京邮电大学拔尖东谈主才教师,博士生导师,具身智能专科发达东谈主,兼任中国东谈主工智能学会理事、领略系统与信息处理专委会布告长、中国蓄意机学会智能机器东谈主专委会常务委员,在视触觉感知、东谈主机交互与操作大模子等具身智能方朝上产出系列代表性更正后果。
机器东谈主前瞻在与方斌的疏导中获知,这次比赛所罗致的是谐和的机器东谈主平台,中枢展现了团队在视觉感知、动作生成、双臂协同和真机部署方面的本事。但也正因如斯,瞬恒智能中枢专攻的视触觉时刻并未在比赛中展现。
在精密装置、工件插接、高精度对位等实在对具身智能有需求的实在任务中,机器东谈主参加战斗阶段后,视觉不异会被工件或机械臂本人遮拦。仅凭视觉,模子很难自主完成偏差判断和毫米级的缺点修正。
方斌当今指示瞬恒智能团队的主要方针之一,即是视触觉感知与操作模子深度和会,不停纯视觉模子在物理交互中精度不及、及时反应缺失、仿真与试验脱节的问题。据知道,当今其在高精度工业任务中的装置得手率,比较纯视觉模子已进步了2.25倍。
这个方针并不是瞬恒智能一家公司的一身判断。
在本年ICRA和CVPR商酌机器东谈主议题中,触觉正在被越来越时常地放到具身智能中枢本事框架下猜度。ICRA 2026时代,专项配置了视觉-触觉协同、触觉皮肤、机器东谈主手指触觉传感器集成等多个商酌Workshop和Tutorial,商酌论文与时刻更正数目正在快速加多。
这可能意味着,行业对机器东谈主操作本事的清爽正在发生变化。仅让机器东谈主“看见”物体,照旧不及以撑持更复杂的物理交互。尤其在握取、插接、装置、布置等任务中,机器东谈主需要的不仅仅视觉识别和轨迹策划,还包括对战斗景象、受力变化和狭窄偏差的及时感知。
方斌在接受机器东谈主前瞻采访时暗示:“ICRA具身智能挑战赛考证了在纯视觉条目下咱们操作模子完成实在任务部署的本事。但面向更复杂、更高精度的工业操作,仅靠视觉还不够。视触觉和会要不停的,即是机器东谈主战斗物体之后,若何感知偏差、清爽受力,并完成临了的精致修正。”
从这个角度看,deeptouch.ai在ICRA真机赛场拿下独一满分,并不仅仅一次单项比赛放弃。同期也让一个话题被再次关注:当机器东谈主从展示走向实在功课,操作智能究竟要靠什么补上临了一段本事缺口。
至少在近期的海外会议和实在机器东谈主挑战赛中,谜底照旧越来越明晰:视觉仍然进攻,但触觉正在成为机器东谈主实在参加物理寰宇时难以绕开的模态。
跟着聪惠手、履行器等硬件在触觉感知上的络续熟练JRS直播,谁能实在把触觉融入模子与操作闭环中,可能会成为具身智能行业的下一个“考点”。
 备案号:
备案号: